MEng/BEng (Hons) Robotics [Individual Projects]
The projects currently being displayed are from our current academic year. To view other years please select below.
Zero G Drone
...
Greenhouse Environment and Ripeness Detection
Farming requires a lot of time and a lot of money to be done; this robot tries to reduce the cost of...
Video Link ..
Rear wing for a sports car
This project aims to create a sports car system that increases and decreases its downforce-to-drag r...
Environmental Sensing Platform
Currently a basic Platform for environmental sensing costs over One Hundred Pounds, and only collect...
Automated Vision
The objective of this project is to design and develop an automated walking aid for individuals with...

Machine Vision Putt-Putt Pal
My project plays with machine vision, object detection, embedded systems and golf! I am using a high...
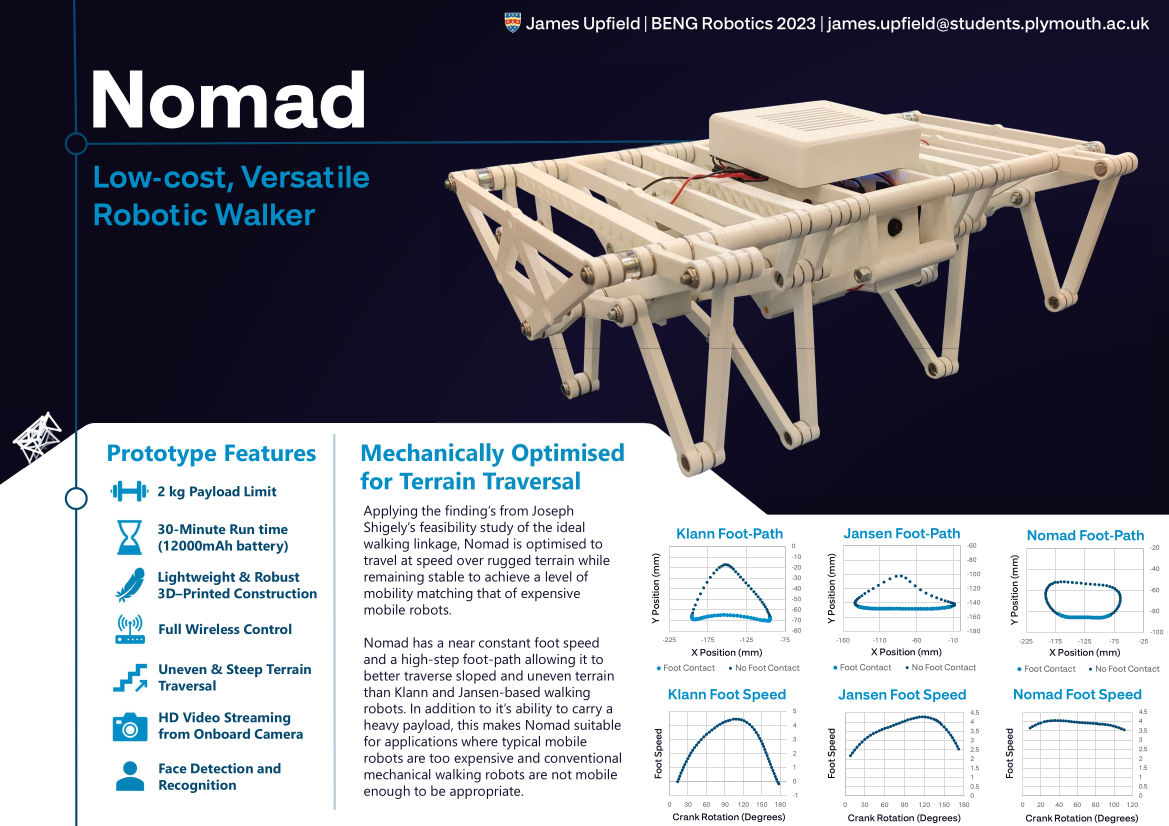
NOMAD - Low Cost, Versatile Robotic Walker
Nomad is a prototype mechanical walker designed to overcome the limitations of current walking robot...
Video Link ..
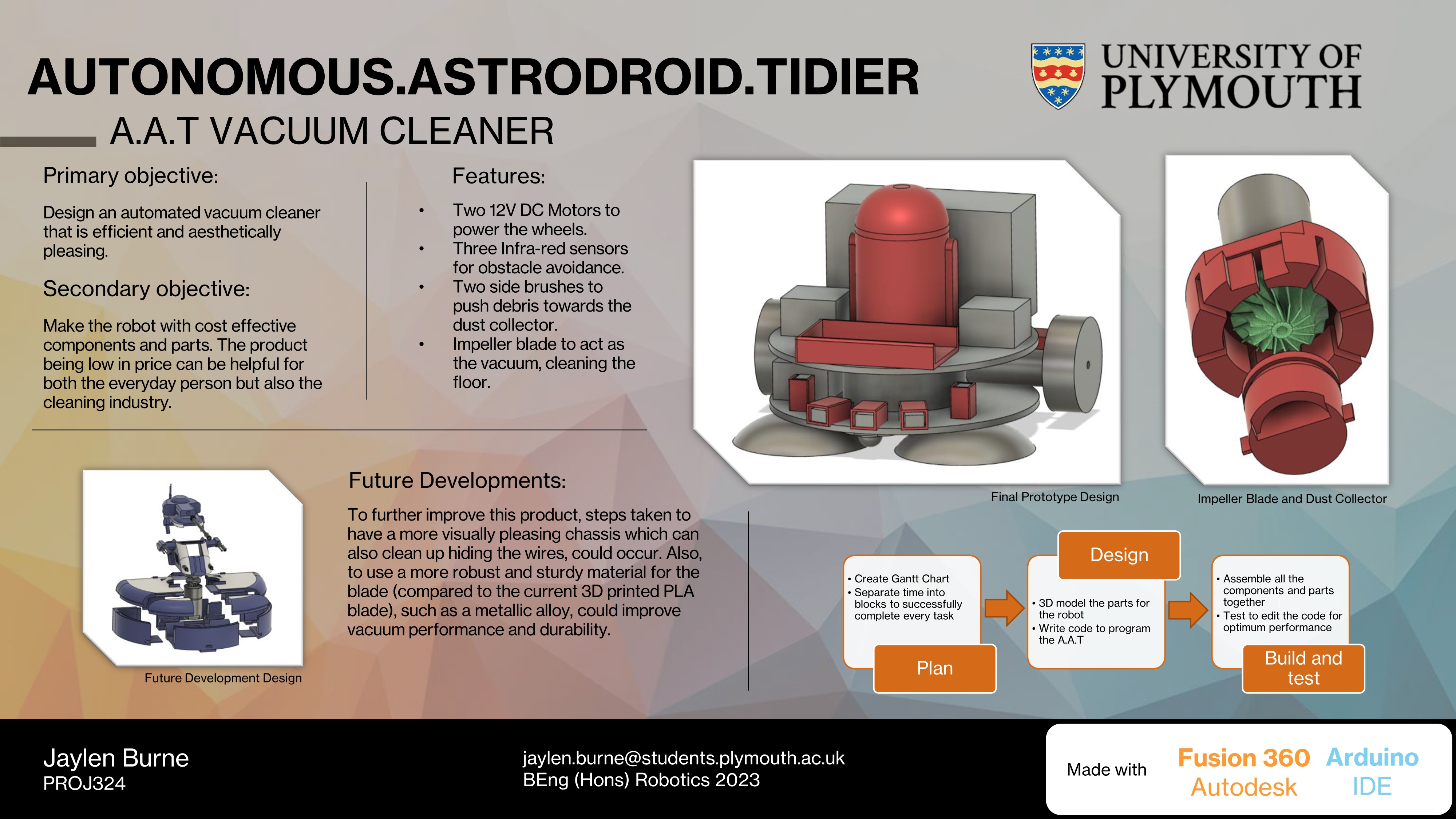
Autonomous Astrodroid Tidier - Vacuum Cleaner
This project presents the development of A.A.T (Autonomous.Astrodroid.Tidier), an autonomous vacuum ...

Self-Balancing Remote Control Bicycle
Here is a self-balancing remote control toy bicycle designed using Solid Edge and 3D printed. The bi...
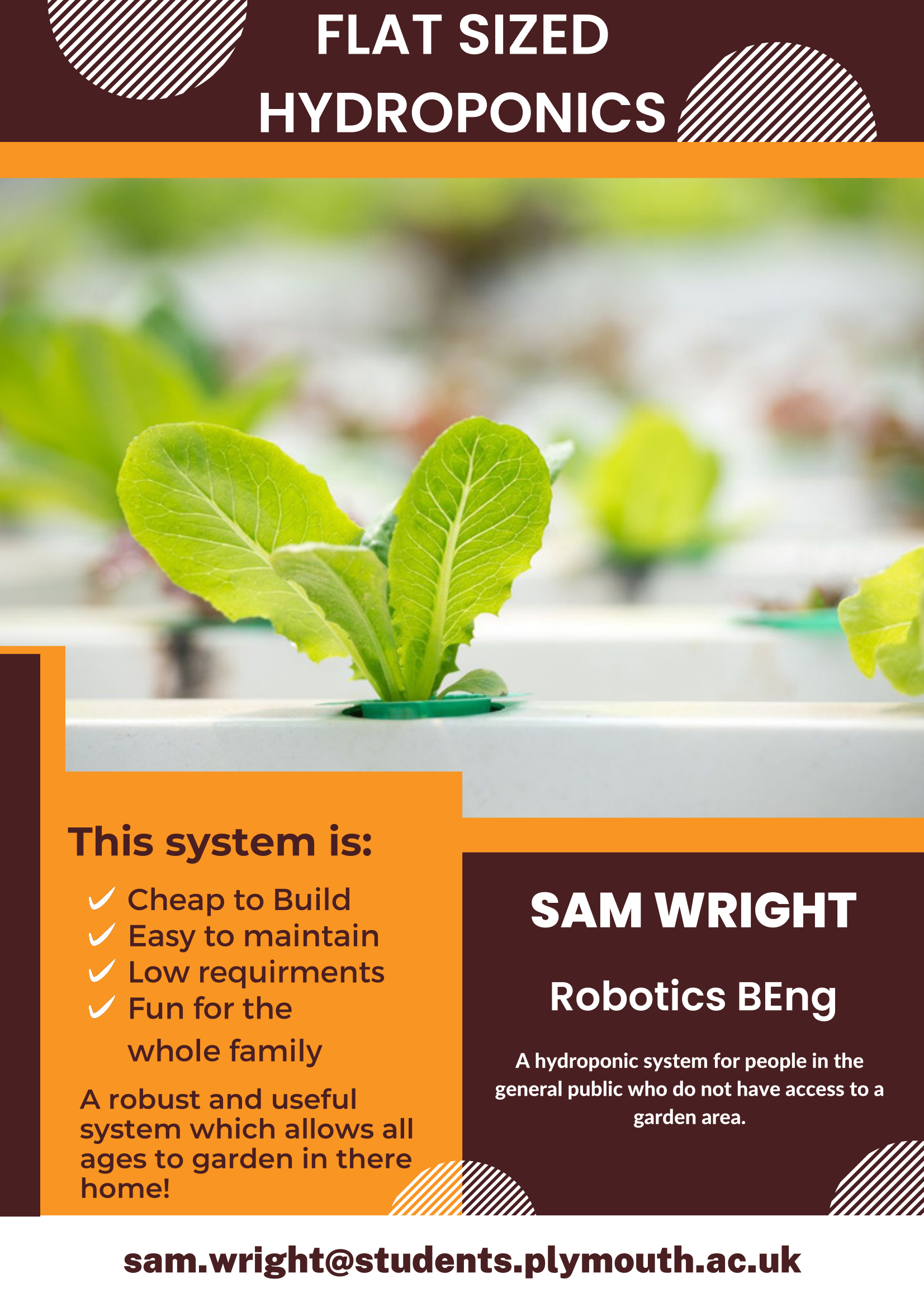
Flat Sized Hydroponics
A Hydroponic system which is designed to be used by all ages to allow everyone access to clean fresh...
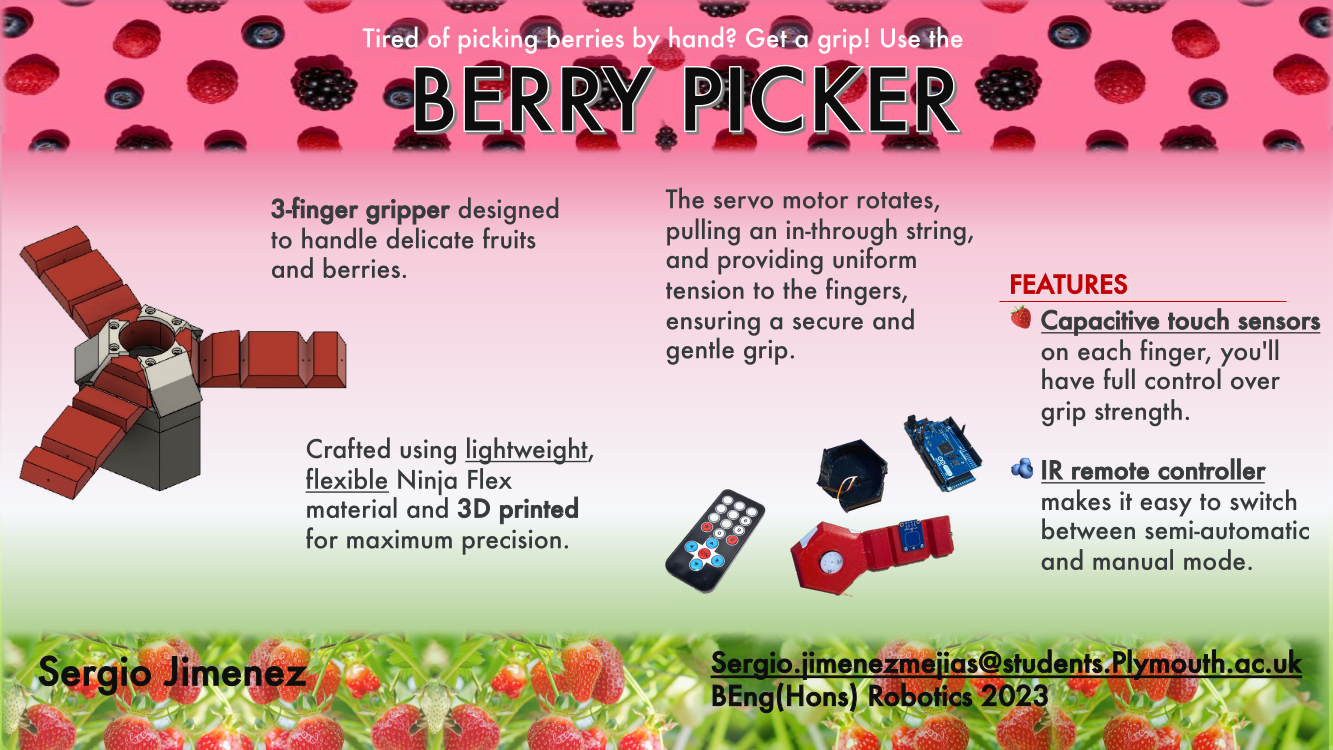
Berry Picker
This project involves the design and development of a 3-finger gripper intended for picking up berri...
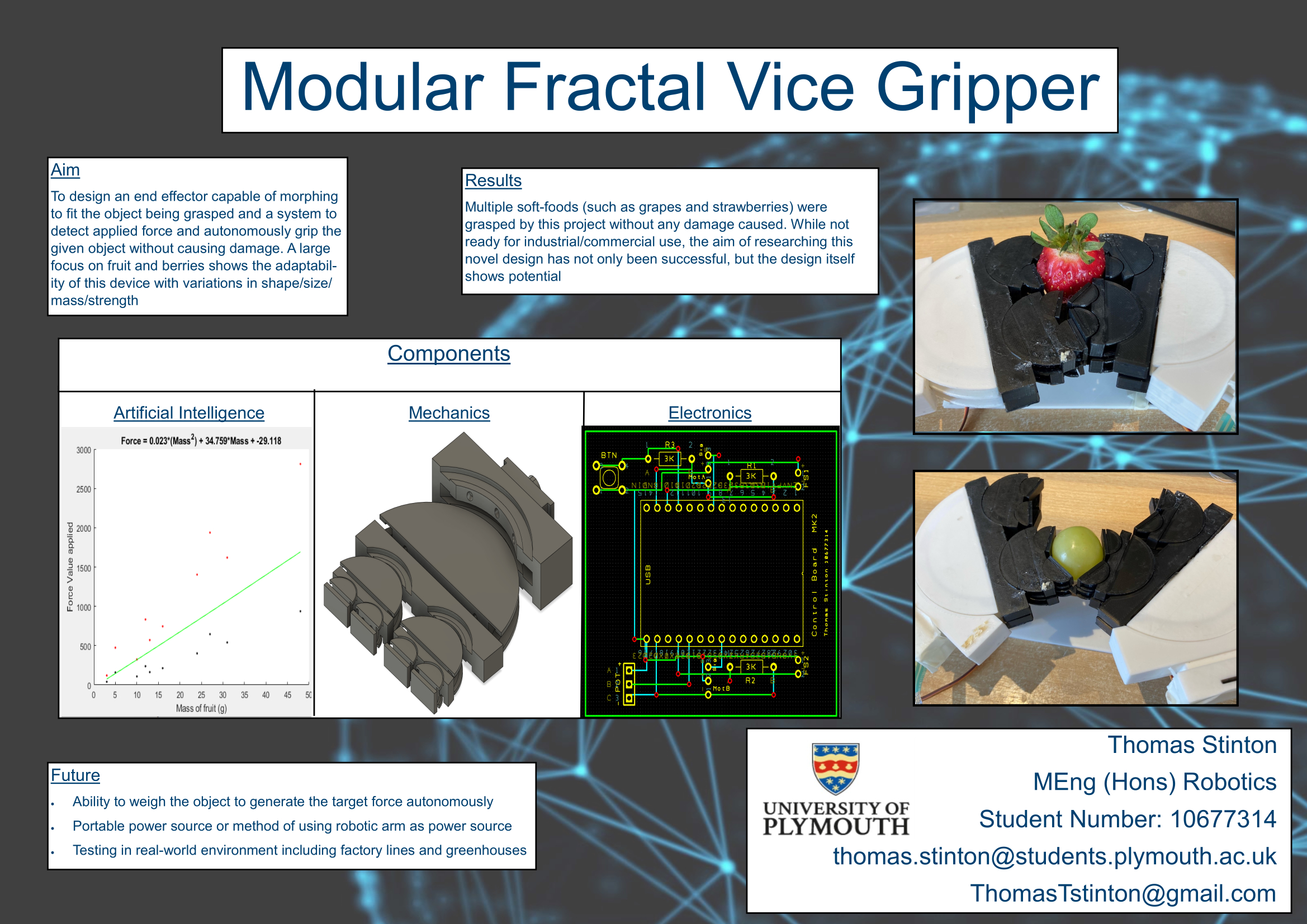
Modular Fractal Vice Gripper
Grasping everyday objects is second nature to most people; however, generalised gripping is a challe...

Tendon Gripper
With the rapid growth in the human population, there has become more and more of a demand to sustain...