MEng (Hons) Electrical and Electronic Engineering and Robotics [Group Projects]
The projects currently being displayed are from our current academic year. To view other years please select below.

Agricultural Robot Arm
As a result of geopolitical events and shifting social attitudes, the agricultural industry in the UK continues to experience the consequences of a significant, nation-wide labour shortage. Over the last few decades, automation has increased to alleviate this problem; various solutions have been developed, from autonomous tractors to robotic arms and even drones. However, their prohibitive expense, weight, and often single-purpose use can make them a difficult investment for farmers to justify. For these reasons, our team has partnered with Robotrix Ltd to develop a remote-controlled, five-degree-of-freedom robotic arm for integration with their Robotic Traction Unit (RTU), a lightweight mobile unit for use in agricultural tasks. The arm has been built from materials specifically chosen for their low cost, light weight, and recyclability. It is driven by brushless motors that are commonly available in the e-skateboarding market, and can handle payloads of over 500 grams, which enables it to pick fruits and vegetables efficiently. Its primary end-effector unit is a three-fingered gripper made from TPU, which allows it to handle crops softly. The end-effector can be swapped out depending on the task required, be it picking, digging, or spraying pesticide, thanks to a simple locking mechanism. The arm’s control system counteracts collisions through backdrivability, thereby reducing the potential for injury to human workers or damage to itself. Communication between its master unit and the motor drivers takes place over a two-wire CAN line, which reduces its overall weight by cutting down on the number of wires required. Although the arm is in its prototype stage, the end goal for its development is a fully comprehensive platform that is capable of autonomously conducting a range of agricultural tasks.
As a result of geopolitical events and shifting social attitudes, the agricultural industry in the U...
Video Link ..
Calculating & Replicating Sartorial Measurements
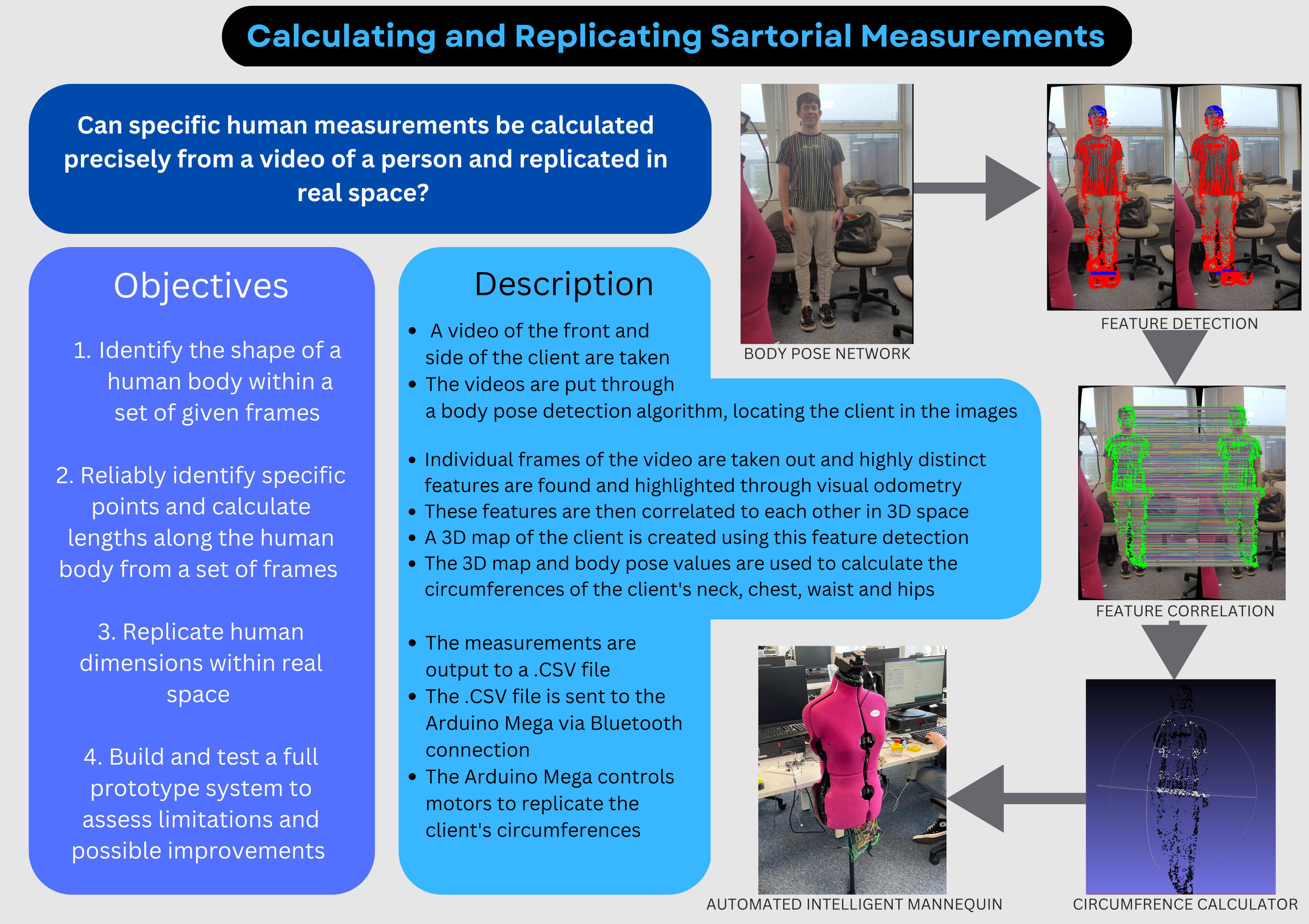
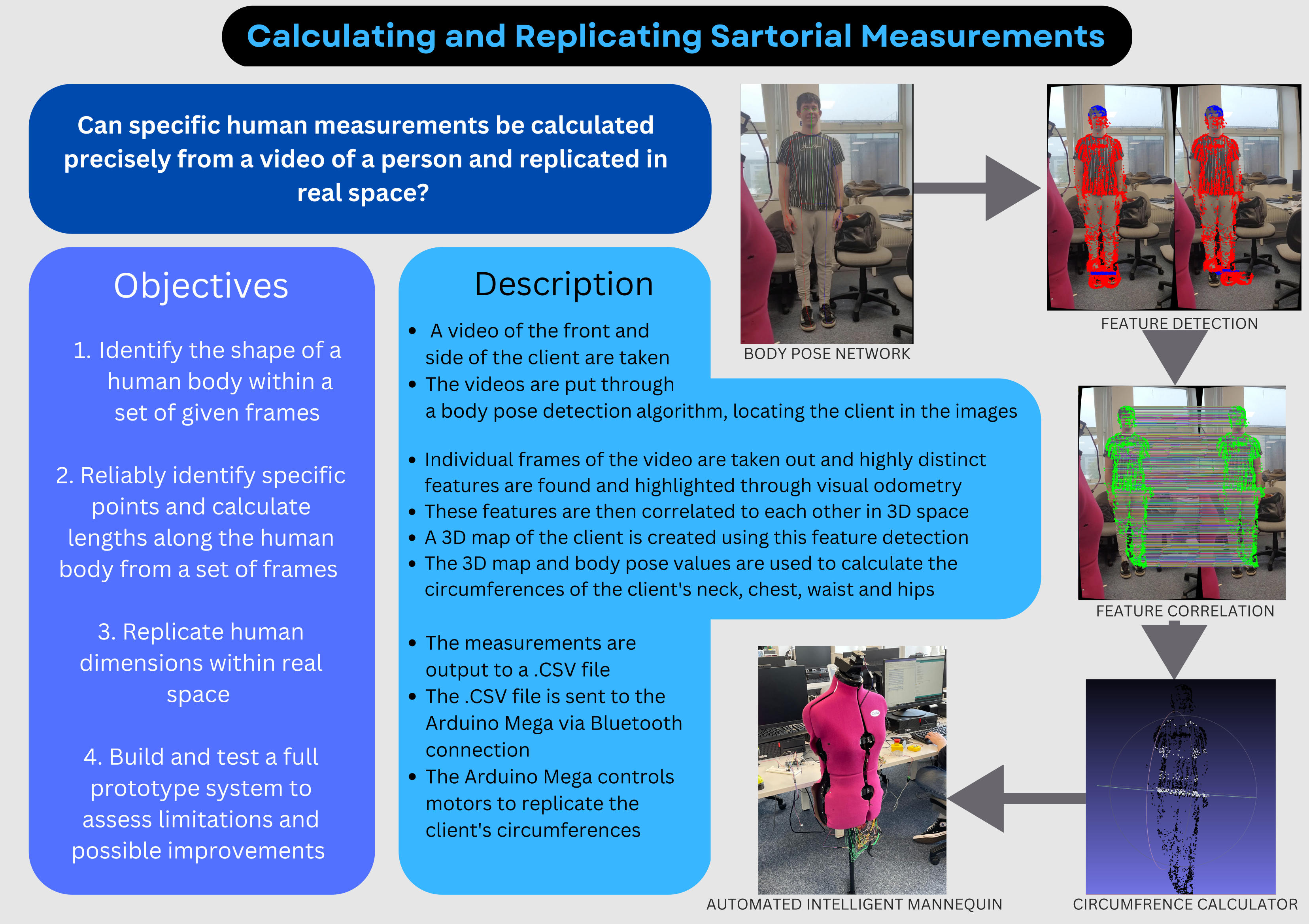
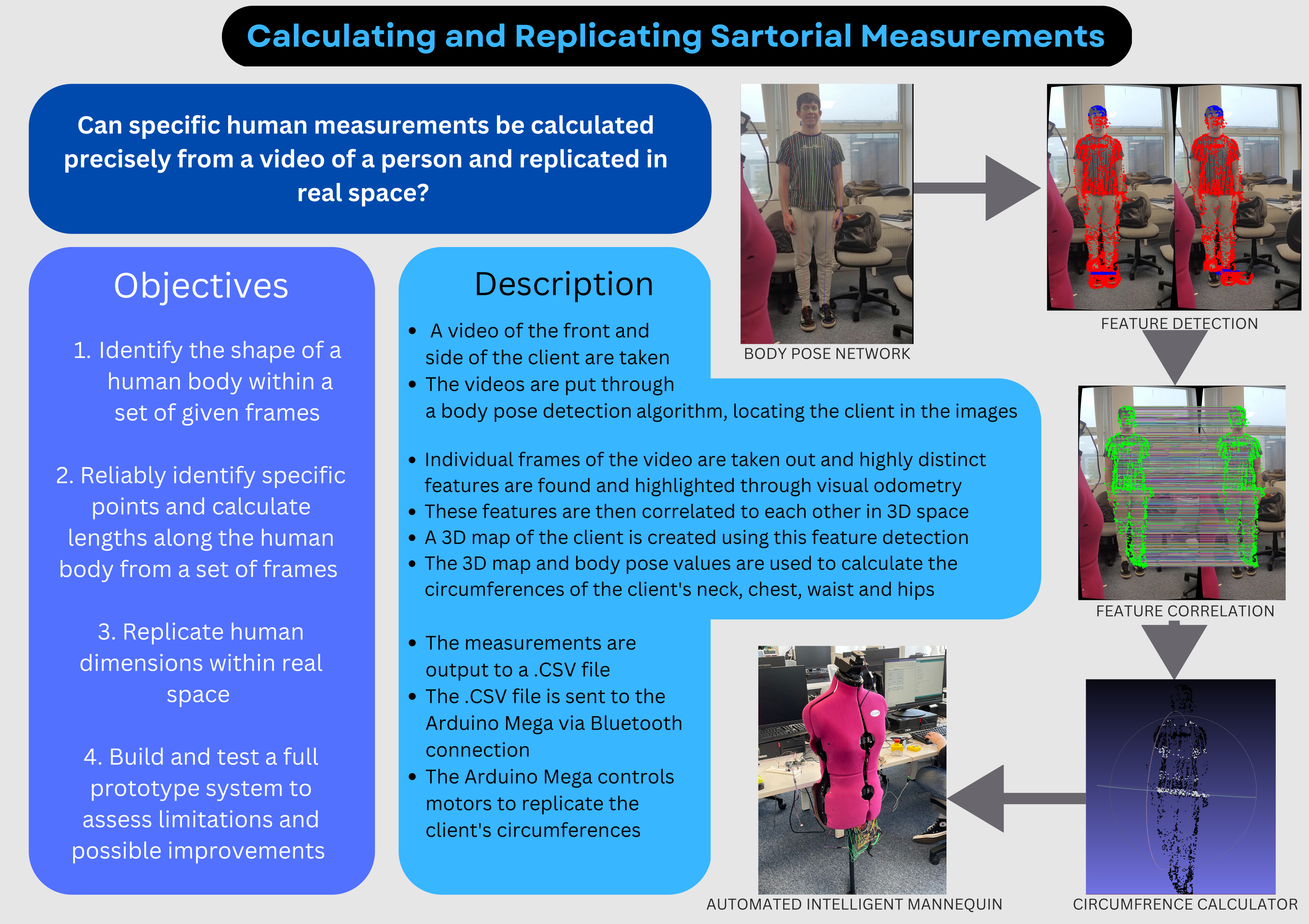
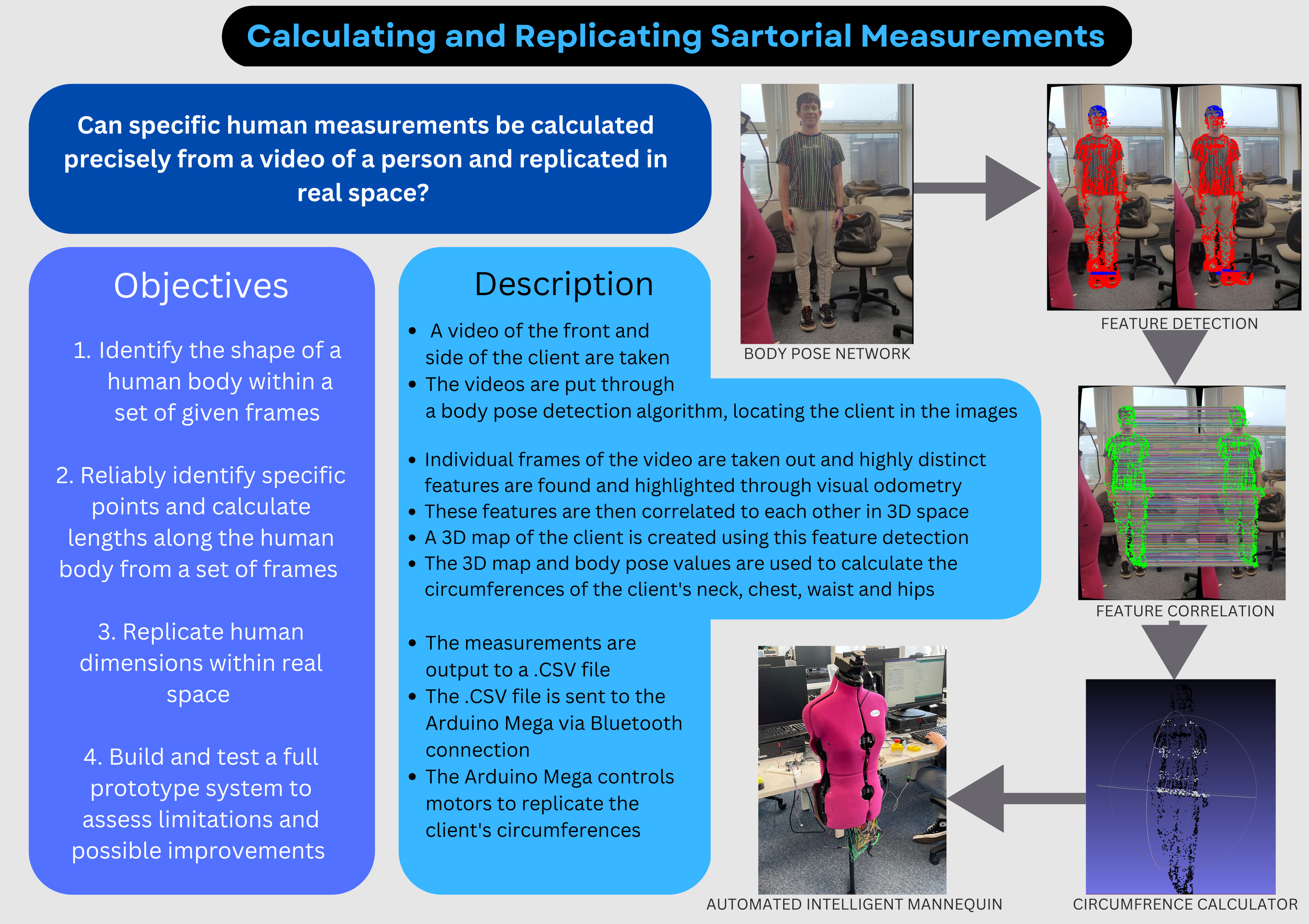
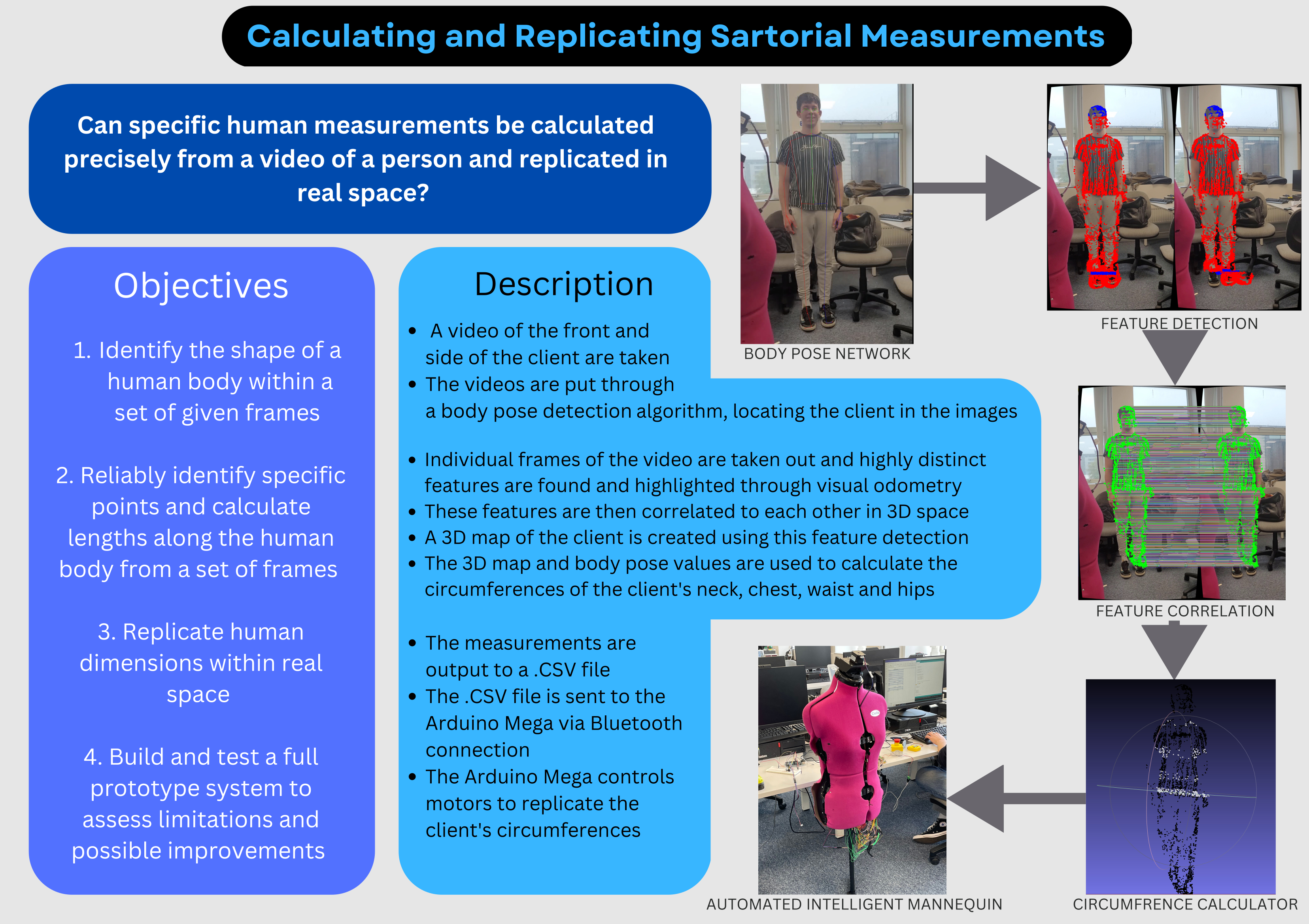
Tailoring clothes is a highly skilled, manual labour-intensive industry that has not adopted many technological advances of the past twenty years. At this point in time, the main technology the tailoring industry has adopted is the Internet but only in a limited capacity in the form of digital storefronts and instant communications between clients and tailors. This project aims to design and implement novel technologies into the tailoring industry by automating a variably adjusting mannequin and creating a complimentary computer vision system that can calculate the client’s sartorial measurements from a set of videos of their body.This project covers the design and implementation of an intelligently adjusting mannequin, that removes a tedious step within the tailoring process while increasing the accuracy and precision available to tailors. The objective of the system is to capture the client’s sartorial measurements via videos taken from many different angles, and then to replicate the dimensions on an automated, adjustable mannequin. Videos of the client are processed by a machine learning algorithm and a computer vision program working in tandem. These systems identify the client in 3D space and calculate their measurements using a body-pose-detection model and visual odometry. The measurements that are identified on the client are their neck, chest, waist, and hips. These measurements are then sent over Bluetooth to an Arduino Mega via an ESP32 Bluetooth module. The Arduino Mega controls twelve stepper motors that each drive a 3D-printed mechanism. Each mechanism is responsible for adjusting one of the mannequin’s various dimensions. The motion of the mannequin is verified by ultrasonic sensors that are mounted internally. Once the process has finished and the mannequin has become stationary once again, the tailor has an accurate depiction of the client’s measurements ready to use.
Tailoring clothes is a highly skilled, manual labour-intensive industry that has not adopted many te...
Calculating & Replicating Sartorial Measurements
Tailoring clothes is a highly skilled, manual labour-intensive industry that has not adopted many technological advances of the past twenty years. At this point in time, the main technology the tailoring industry has adopted is the Internet but only in a limited capacity in the form of digital storefronts and instant communications between clients and tailors. This project aims to design and implement novel technologies into the tailoring industry by automating a variably adjusting mannequin and creating a complimentary computer vision system that can calculate the client’s sartorial measurements from a set of videos of their body.This project covers the design and implementation of an intelligently adjusting mannequin, that removes a tedious step within the tailoring process while increasing the accuracy and precision available to tailors. The objective of the system is to capture the client’s sartorial measurements via videos taken from many different angles, and then to replicate the dimensions on an automated, adjustable mannequin. Videos of the client are processed by a machine learning algorithm and a computer vision program working in tandem. These systems identify the client in 3D space and calculate their measurements using a body-pose-detection model and visual odometry. The measurements that are identified on the client are their neck, chest, waist, and hips. These measurements are then sent over Bluetooth to an Arduino Mega via an ESP32 Bluetooth module. The Arduino Mega controls twelve stepper motors that each drive a 3D-printed mechanism. Each mechanism is responsible for adjusting one of the mannequin’s various dimensions. The motion of the mannequin is verified by ultrasonic sensors that are mounted internally. Once the process has finished and the mannequin has become stationary once again, the tailor has an accurate depiction of the client’s measurements ready to use.
Tailoring clothes is a highly skilled, manual labour-intensive industry that has not adopted many te...
Home Electric Vehicle Charging System
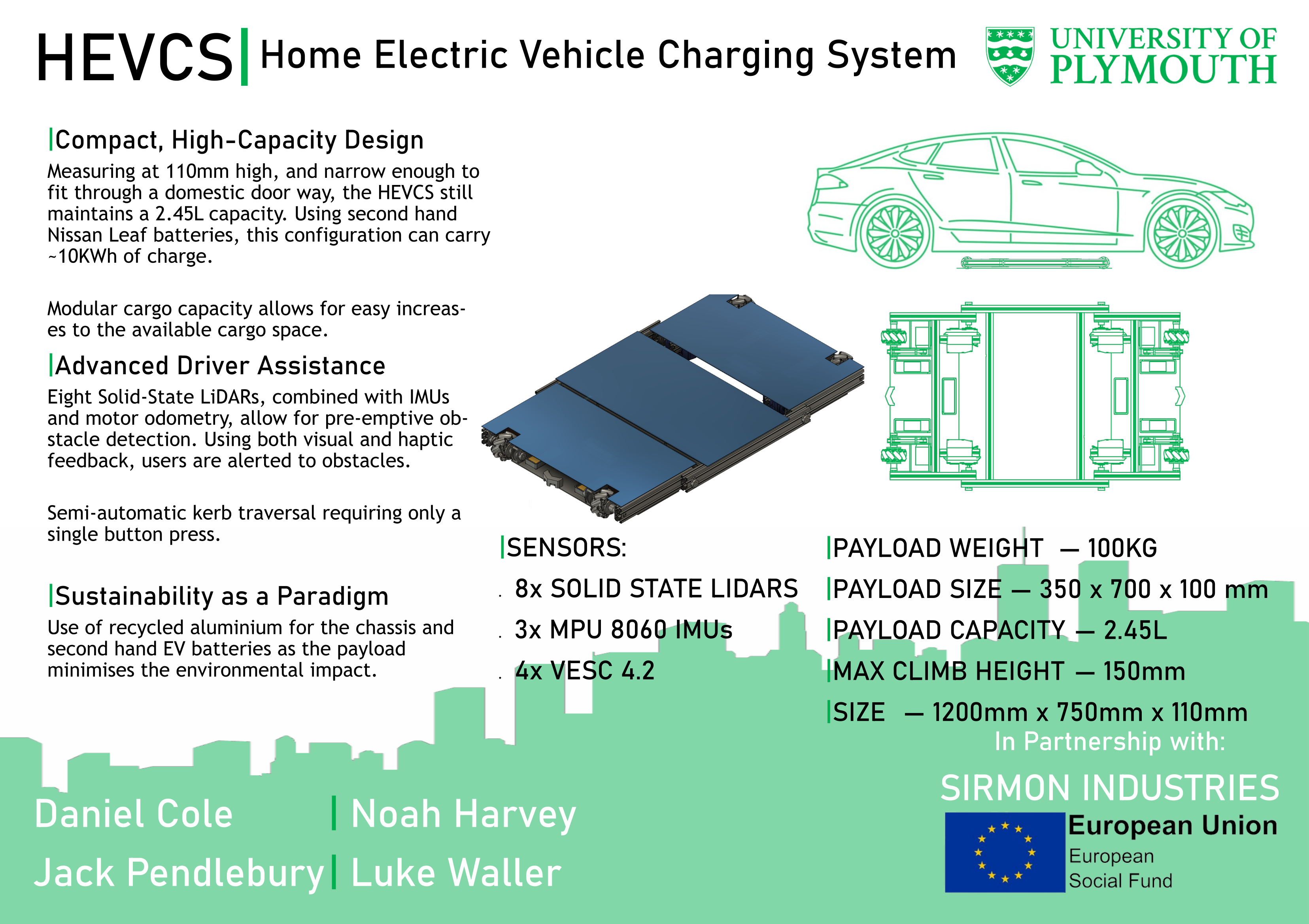
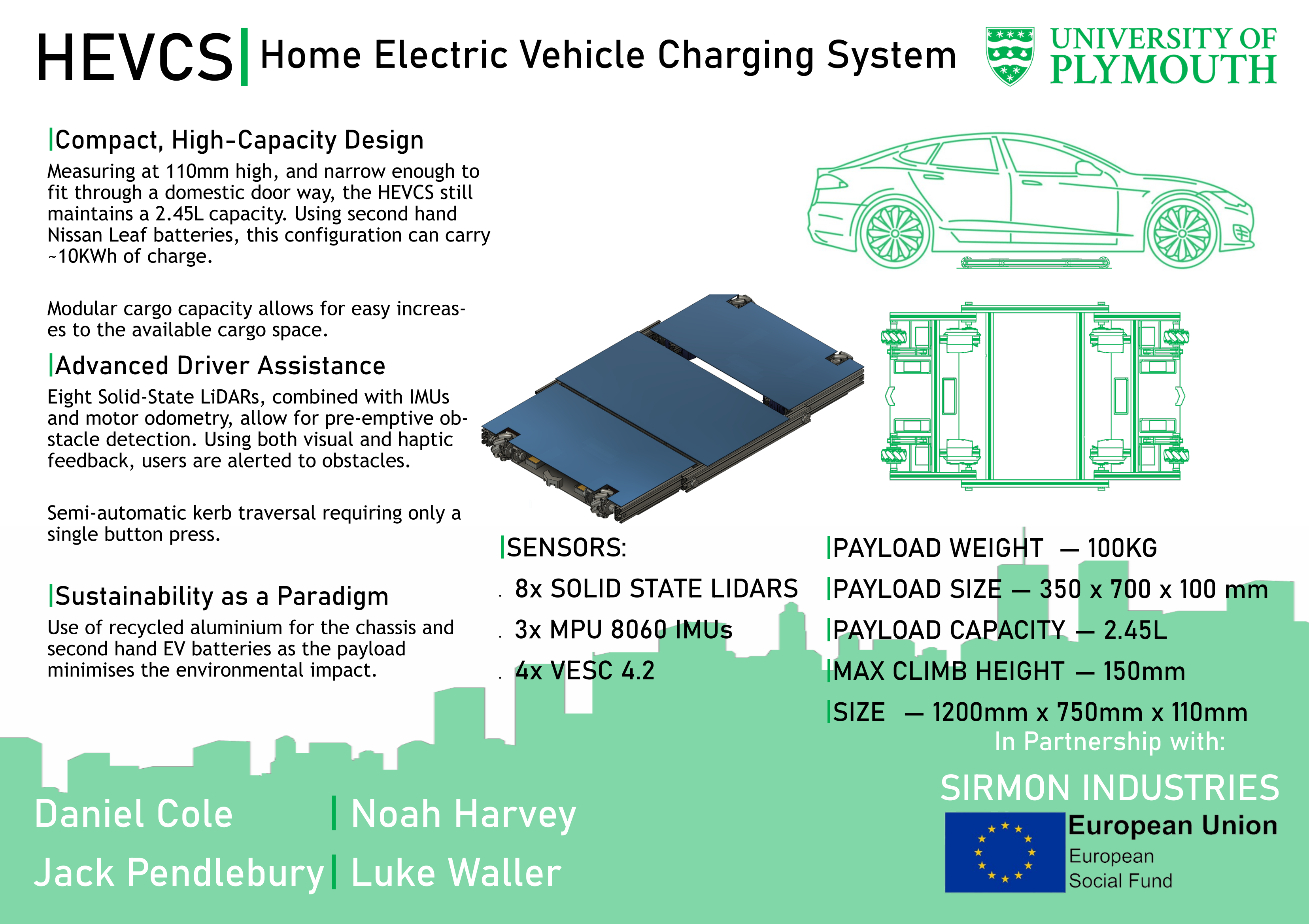
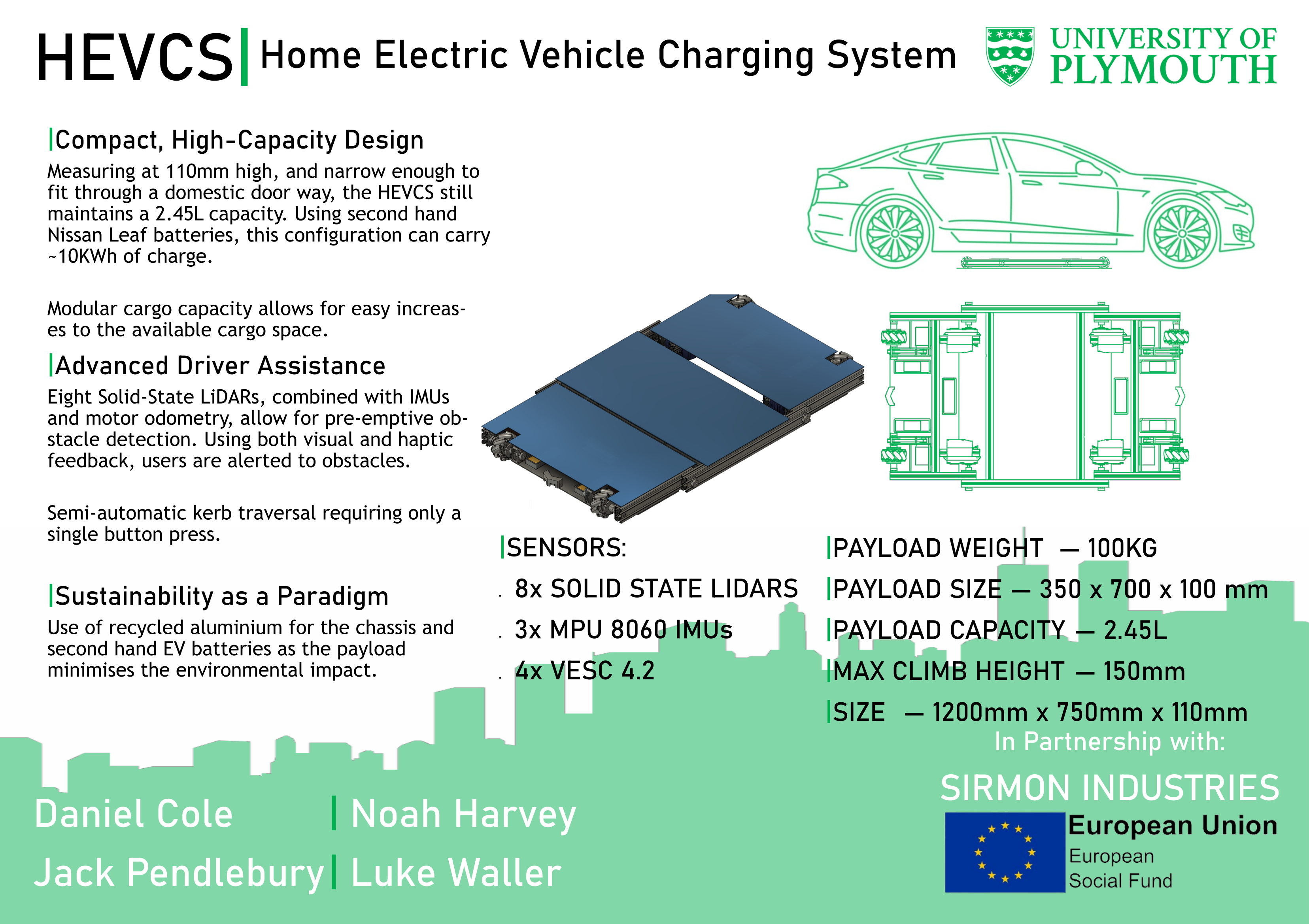
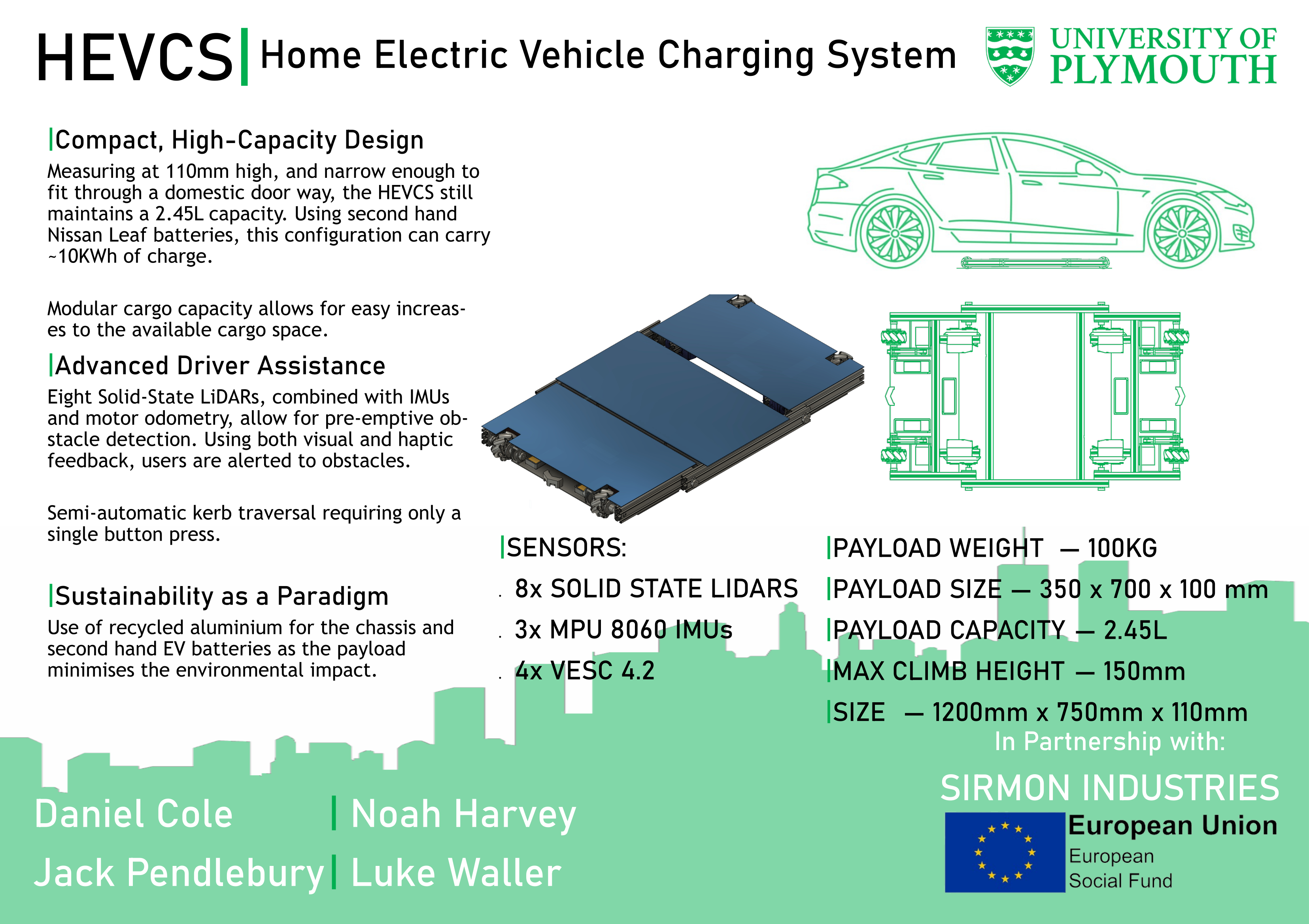
This project aims to address the challenge posed by the UK Government's ban on the sale of new petrol and diesel cars by 2030 along with the lack of critical charging infrastructure for electric vehicles in the country. To tackle this challenge, the HEVCS has been developed. The HEVCS has a compact and versatile design with a height of just 110mm, making it suitable for use with most electric vehicles. It features an adjustable payload compartment that can store a battery capacity suitable for the customer’s needs. Additionally, the HEVCS can climb kerbs up to 150mm tall, making it suitable for use in both urban and rural environments.The HEVCS uses mecanum wheels, which provide advanced control and manoeuvrability that allows the platform to move in any direction, making it an ideal choice for tight spaces. Moreover, the HEVCS conforms to class 2 mobility scooter legislation, which means it is considered a pavement vehicle with a maximum speed of 4mph. It achieves this using a tethered controller to allow secure control over the platform's movements. This feature ensures that the HEVCS aligns with the safety regulations for class 2 vehicles. The HEVCS is a more affordable solution than installing a built-in charging circuit and provides a practical alternative for households without access to off-road parking or garages. The HEVCS is charged within the user's home and comes with a vertical dock for easy charging.In summary, the HEVCS is a practical choice of vehicle charging solution which incorporates a compact design, adjustable payload compartment, mecanum wheels, and an affordable cost. The HEVCS offers a viable alternative to the current lack of charging infrastructure in the country, providing an accessible way for individuals to transition to electric vehicles.
This project aims to address the challenge posed by the UK Government's ban on the sale of new petro...

Agricultural Robot Arm
As a result of geopolitical events and shifting social attitudes, the agricultural industry in the UK continues to experience the consequences of a significant, nation-wide labour shortage. Over the last few decades, automation has increased to alleviate this problem; various solutions have been developed, from autonomous tractors to robotic arms and even drones. However, their prohibitive expense, weight, and often single-purpose use can make them a difficult investment for farmers to justify. For these reasons, our team has partnered with Robotrix Ltd to develop a remote-controlled, five-degree-of-freedom robotic arm for integration with their Robotic Traction Unit (RTU), a lightweight mobile unit for use in agricultural tasks. The arm has been built from materials specifically chosen for their low cost, light weight, and recyclability. It is driven by brushless motors that are commonly available in the e-skateboarding market, and can handle payloads of over 500 grams, which enables it to pick fruits and vegetables efficiently. Its primary end-effector unit is a three-fingered gripper made from TPU, which allows it to handle crops softly. The end-effector can be swapped out depending on the task required, be it picking, digging, or spraying pesticide, thanks to a simple locking mechanism. The arm’s control system counteracts collisions through backdrivability, thereby reducing the potential for injury to human workers or damage to itself. Communication between its master unit and the motor drivers takes place over a two-wire CAN line, which reduces its overall weight by cutting down on the number of wires required. Although the arm is in its prototype stage, the end goal for its development is a fully comprehensive platform that is capable of autonomously conducting a range of agricultural tasks.
As a result of geopolitical events and shifting social attitudes, the agricultural industry in the U...
Home Electric Vehicle Charging System
This project aims to address the challenge posed by the UK Government's ban on the sale of new petrol and diesel cars by 2030 along with the lack of critical charging infrastructure for electric vehicles in the country. To tackle this challenge, the HEVCS has been developed. The HEVCS has a compact and versatile design with a height of just 110mm, making it suitable for use with most electric vehicles. It features an adjustable payload compartment that can store a battery capacity suitable for the customer’s needs. Additionally, the HEVCS can climb kerbs up to 150mm tall, making it suitable for use in both urban and rural environments.The HEVCS uses mecanum wheels, which provide advanced control and manoeuvrability that allows the platform to move in any direction, making it an ideal choice for tight spaces. Moreover, the HEVCS conforms to class 2 mobility scooter legislation, which means it is considered a pavement vehicle with a maximum speed of 4mph. It achieves this using a tethered controller to allow secure control over the platform's movements. This feature ensures that the HEVCS aligns with the safety regulations for class 2 vehicles. The HEVCS is a more affordable solution than installing a built-in charging circuit and provides a practical alternative for households without access to off-road parking or garages. The HEVCS is charged within the user's home and comes with a vertical dock for easy charging.In summary, the HEVCS is a practical choice of vehicle charging solution which incorporates a compact design, adjustable payload compartment, mecanum wheels, and an affordable cost. The HEVCS offers a viable alternative to the current lack of charging infrastructure in the country, providing an accessible way for individuals to transition to electric vehicles.
This project aims to address the challenge posed by the UK Government's ban on the sale of new petro...
Video Link ..
Calculating & Replicating Sartorial Measurements
Tailoring clothes is a highly skilled, manual labour-intensive industry that has not adopted many technological advances of the past twenty years. At this point in time, the main technology the tailoring industry has adopted is the Internet but only in a limited capacity in the form of digital storefronts and instant communications between clients and tailors. This project aims to design and implement novel technologies into the tailoring industry by automating a variably adjusting mannequin and creating a complimentary computer vision system that can calculate the client’s sartorial measurements from a set of videos of their body.This project covers the design and implementation of an intelligently adjusting mannequin, that removes a tedious step within the tailoring process while increasing the accuracy and precision available to tailors. The objective of the system is to capture the client’s sartorial measurements via videos taken from many different angles, and then to replicate the dimensions on an automated, adjustable mannequin. Videos of the client are processed by a machine learning algorithm and a computer vision program working in tandem. These systems identify the client in 3D space and calculate their measurements using a body-pose-detection model and visual odometry. The measurements that are identified on the client are their neck, chest, waist, and hips. These measurements are then sent over Bluetooth to an Arduino Mega via an ESP32 Bluetooth module. The Arduino Mega controls twelve stepper motors that each drive a 3D-printed mechanism. Each mechanism is responsible for adjusting one of the mannequin’s various dimensions. The motion of the mannequin is verified by ultrasonic sensors that are mounted internally. Once the process has finished and the mannequin has become stationary once again, the tailor has an accurate depiction of the client’s measurements ready to use.
Tailoring clothes is a highly skilled, manual labour-intensive industry that has not adopted many te...

Agricultural Robot Arm
As a result of geopolitical events and shifting social attitudes, the agricultural industry in the UK continues to experience the consequences of a significant, nation-wide labour shortage. Over the last few decades, automation has increased to alleviate this problem; various solutions have been developed, from autonomous tractors to robotic arms and even drones. However, their prohibitive expense, weight, and often single-purpose use can make them a difficult investment for farmers to justify. For these reasons, our team has partnered with Robotrix Ltd to develop a remote-controlled, five-degree-of-freedom robotic arm for integration with their Robotic Traction Unit (RTU), a lightweight mobile unit for use in agricultural tasks. The arm has been built from materials specifically chosen for their low cost, light weight, and recyclability. It is driven by brushless motors that are commonly available in the e-skateboarding market, and can handle payloads of over 500 grams, which enables it to pick fruits and vegetables efficiently. Its primary end-effector unit is a three-fingered gripper made from TPU, which allows it to handle crops softly. The end-effector can be swapped out depending on the task required, be it picking, digging, or spraying pesticide, thanks to a simple locking mechanism. The arm’s control system counteracts collisions through backdrivability, thereby reducing the potential for injury to human workers or damage to itself. Communication between its master unit and the motor drivers takes place over a two-wire CAN line, which reduces its overall weight by cutting down on the number of wires required. Although the arm is in its prototype stage, the end goal for its development is a fully comprehensive platform that is capable of autonomously conducting a range of agricultural tasks.
As a result of geopolitical events and shifting social attitudes, the agricultural industry in the U...
Video Link ..
Home Electric Vehicle Charging System
This project aims to address the challenge posed by the UK Government's ban on the sale of new petrol and diesel cars by 2030 along with the lack of critical charging infrastructure for electric vehicles in the country. To tackle this challenge, the HEVCS has been developed. The HEVCS has a compact and versatile design with a height of just 110mm, making it suitable for use with most electric vehicles. It features an adjustable payload compartment that can store a battery capacity suitable for the customer’s needs. Additionally, the HEVCS can climb kerbs up to 150mm tall, making it suitable for use in both urban and rural environments.The HEVCS uses mecanum wheels, which provide advanced control and manoeuvrability that allows the platform to move in any direction, making it an ideal choice for tight spaces. Moreover, the HEVCS conforms to class 2 mobility scooter legislation, which means it is considered a pavement vehicle with a maximum speed of 4mph. It achieves this using a tethered controller to allow secure control over the platform's movements. This feature ensures that the HEVCS aligns with the safety regulations for class 2 vehicles. The HEVCS is a more affordable solution than installing a built-in charging circuit and provides a practical alternative for households without access to off-road parking or garages. The HEVCS is charged within the user's home and comes with a vertical dock for easy charging.In summary, the HEVCS is a practical choice of vehicle charging solution which incorporates a compact design, adjustable payload compartment, mecanum wheels, and an affordable cost. The HEVCS offers a viable alternative to the current lack of charging infrastructure in the country, providing an accessible way for individuals to transition to electric vehicles.
This project aims to address the challenge posed by the UK Government's ban on the sale of new petro...
Video Link ..

Agricultural Robot Arm
As a result of geopolitical events and shifting social attitudes, the agricultural industry in the UK continues to experience the consequences of a significant, nation-wide labour shortage. Over the last few decades, automation has increased to alleviate this problem; various solutions have been developed, from autonomous tractors to robotic arms and even drones. However, their prohibitive expense, weight, and often single-purpose use can make them a difficult investment for farmers to justify. For these reasons, our team has partnered with Robotrix Ltd to develop a remote-controlled, five-degree-of-freedom robotic arm for integration with their Robotic Traction Unit (RTU), a lightweight mobile unit for use in agricultural tasks. The arm has been built from materials specifically chosen for their low cost, light weight, and recyclability. It is driven by brushless motors that are commonly available in the e-skateboarding market, and can handle payloads of over 500 grams, which enables it to pick fruits and vegetables efficiently. Its primary end-effector unit is a three-fingered gripper made from TPU, which allows it to handle crops softly. The end-effector can be swapped out depending on the task required, be it picking, digging, or spraying pesticide, thanks to a simple locking mechanism. The arm’s control system counteracts collisions through backdrivability, thereby reducing the potential for injury to human workers or damage to itself. Communication between its master unit and the motor drivers takes place over a two-wire CAN line, which reduces its overall weight by cutting down on the number of wires required. Although the arm is in its prototype stage, the end goal for its development is a fully comprehensive platform that is capable of autonomously conducting a range of agricultural tasks.
As a result of geopolitical events and shifting social attitudes, the agricultural industry in the U...
Video Link ..
Home Electric Vehicle Charging System
This project aims to address the challenge posed by the UK Government's ban on the sale of new petrol and diesel cars by 2030 along with the lack of critical charging infrastructure for electric vehicles in the country. To tackle this challenge, the HEVCS has been developed. The HEVCS has a compact and versatile design with a height of just 110mm, making it suitable for use with most electric vehicles. It features an adjustable payload compartment that can store a battery capacity suitable for the customer’s needs. Additionally, the HEVCS can climb kerbs up to 150mm tall, making it suitable for use in both urban and rural environments.The HEVCS uses mecanum wheels, which provide advanced control and manoeuvrability that allows the platform to move in any direction, making it an ideal choice for tight spaces. Moreover, the HEVCS conforms to class 2 mobility scooter legislation, which means it is considered a pavement vehicle with a maximum speed of 4mph. It achieves this using a tethered controller to allow secure control over the platform's movements. This feature ensures that the HEVCS aligns with the safety regulations for class 2 vehicles. The HEVCS is a more affordable solution than installing a built-in charging circuit and provides a practical alternative for households without access to off-road parking or garages. The HEVCS is charged within the user's home and comes with a vertical dock for easy charging.In summary, the HEVCS is a practical choice of vehicle charging solution which incorporates a compact design, adjustable payload compartment, mecanum wheels, and an affordable cost. The HEVCS offers a viable alternative to the current lack of charging infrastructure in the country, providing an accessible way for individuals to transition to electric vehicles.
This project aims to address the challenge posed by the UK Government's ban on the sale of new petro...
Video Link ..
Calculating & Replicating Sartorial Measurements
Tailoring clothes is a highly skilled, manual labour-intensive industry that has not adopted many technological advances of the past twenty years. At this point in time, the main technology the tailoring industry has adopted is the Internet but only in a limited capacity in the form of digital storefronts and instant communications between clients and tailors. This project aims to design and implement novel technologies into the tailoring industry by automating a variably adjusting mannequin and creating a complimentary computer vision system that can calculate the client’s sartorial measurements from a set of videos of their body.This project covers the design and implementation of an intelligently adjusting mannequin, that removes a tedious step within the tailoring process while increasing the accuracy and precision available to tailors. The objective of the system is to capture the client’s sartorial measurements via videos taken from many different angles, and then to replicate the dimensions on an automated, adjustable mannequin. Videos of the client are processed by a machine learning algorithm and a computer vision program working in tandem. These systems identify the client in 3D space and calculate their measurements using a body-pose-detection model and visual odometry. The measurements that are identified on the client are their neck, chest, waist, and hips. These measurements are then sent over Bluetooth to an Arduino Mega via an ESP32 Bluetooth module. The Arduino Mega controls twelve stepper motors that each drive a 3D-printed mechanism. Each mechanism is responsible for adjusting one of the mannequin’s various dimensions. The motion of the mannequin is verified by ultrasonic sensors that are mounted internally. Once the process has finished and the mannequin has become stationary once again, the tailor has an accurate depiction of the client’s measurements ready to use.
Tailoring clothes is a highly skilled, manual labour-intensive industry that has not adopted many te...
Calculating & Replicating Sartorial Measurements
Tailoring clothes is a highly skilled, manual labour-intensive industry that has not adopted many technological advances of the past twenty years. At this point in time, the main technology the tailoring industry has adopted is the Internet but only in a limited capacity in the form of digital storefronts and instant communications between clients and tailors. This project aims to design and implement novel technologies into the tailoring industry by automating a variably adjusting mannequin and creating a complimentary computer vision system that can calculate the client’s sartorial measurements from a set of videos of their body.This project covers the design and implementation of an intelligently adjusting mannequin, that removes a tedious step within the tailoring process while increasing the accuracy and precision available to tailors. The objective of the system is to capture the client’s sartorial measurements via videos taken from many different angles, and then to replicate the dimensions on an automated, adjustable mannequin. Videos of the client are processed by a machine learning algorithm and a computer vision program working in tandem. These systems identify the client in 3D space and calculate their measurements using a body-pose-detection model and visual odometry. The measurements that are identified on the client are their neck, chest, waist, and hips. These measurements are then sent over Bluetooth to an Arduino Mega via an ESP32 Bluetooth module. The Arduino Mega controls twelve stepper motors that each drive a 3D-printed mechanism. Each mechanism is responsible for adjusting one of the mannequin’s various dimensions. The motion of the mannequin is verified by ultrasonic sensors that are mounted internally. Once the process has finished and the mannequin has become stationary once again, the tailor has an accurate depiction of the client’s measurements ready to use.
Tailoring clothes is a highly skilled, manual labour-intensive industry that has not adopted many te...

Agricultural Robot Arm
As a result of geopolitical events and shifting social attitudes, the agricultural industry in the UK continues to experience the consequences of a significant, nation-wide labour shortage. Over the last few decades, automation has increased to alleviate this problem; various solutions have been developed, from autonomous tractors to robotic arms and even drones. However, their prohibitive expense, weight, and often single-purpose use can make them a difficult investment for farmers to justify. For these reasons, our team has partnered with Robotrix Ltd to develop a remote-controlled, five-degree-of-freedom robotic arm for integration with their Robotic Traction Unit (RTU), a lightweight mobile unit for use in agricultural tasks. The arm has been built from materials specifically chosen for their low cost, light weight, and recyclability. It is driven by brushless motors that are commonly available in the e-skateboarding market, and can handle payloads of over 500 grams, which enables it to pick fruits and vegetables efficiently. Its primary end-effector unit is a three-fingered gripper made from TPU, which allows it to handle crops softly. The end-effector can be swapped out depending on the task required, be it picking, digging, or spraying pesticide, thanks to a simple locking mechanism. The arm’s control system counteracts collisions through backdrivability, thereby reducing the potential for injury to human workers or damage to itself. Communication between its master unit and the motor drivers takes place over a two-wire CAN line, which reduces its overall weight by cutting down on the number of wires required. Although the arm is in its prototype stage, the end goal for its development is a fully comprehensive platform that is capable of autonomously conducting a range of agricultural tasks.
As a result of geopolitical events and shifting social attitudes, the agricultural industry in the U...